

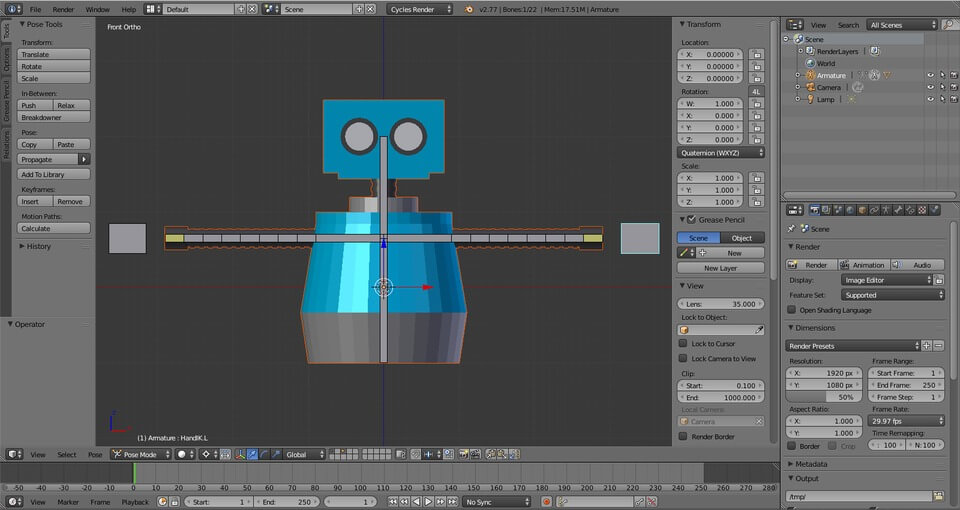
لنبدأ بتحريك الروبوت الخاص بنا. سنقوم بذلك عن طريق العظام. نعم، العظام. والعظام هي التي تشكل المحرّكات Armatures. في بلندر، Rigging هي عمليّة ربط المحركات Armatures بعنصر(جسم) mesh لتمكين حركته. في هذا الدرس، سوف تقوم بعمل Rigging لمحركات بلندر لتحريك الروبوت الخاص بك.
عمل Rigging لمحركات بلندر Blender Armatures
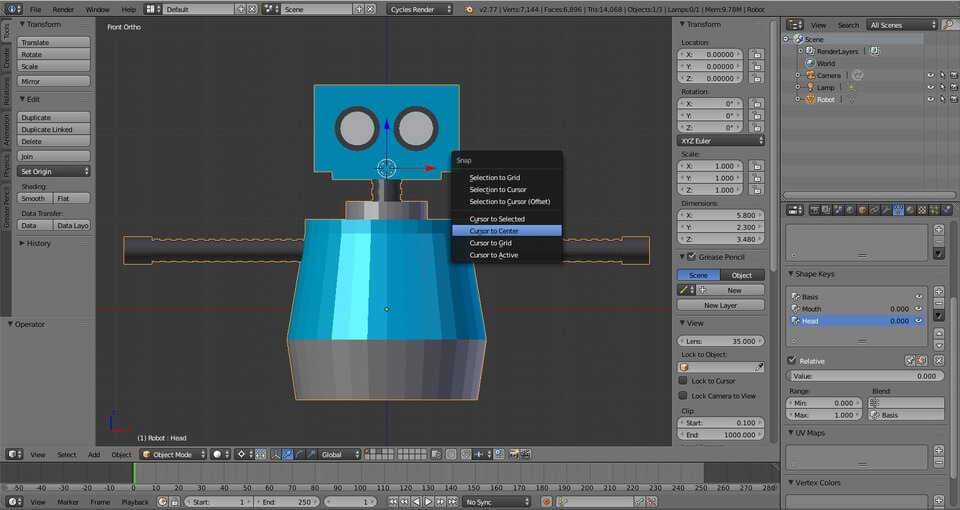
قبل أن ننشئ العظمة الأولى، تأكد من وجود المؤشر ثلاثي الأبعاد في منتصف العرض ثلاثي الأبعاد 3D View. اضغط SHIFT + S واختر Cursor to Center.
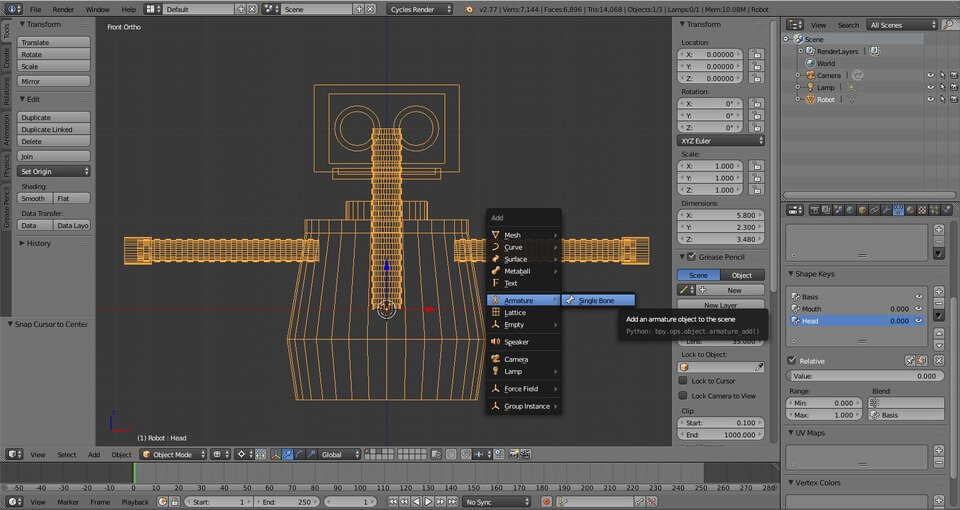
الآن اضغط Z للعرض wireframe وأضف عظمة باستخدام SHIFT + A واختر Armature، Single Bone.
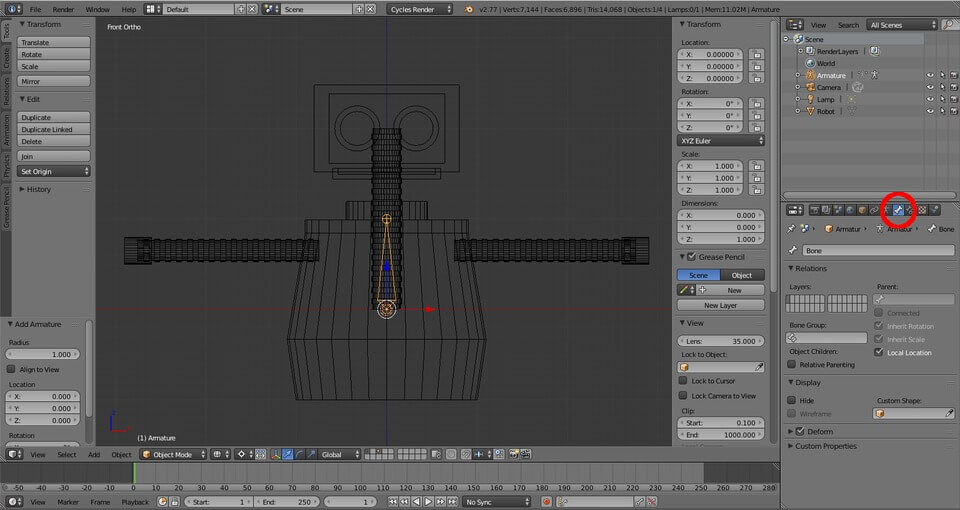
اضغط TAB واختر تبويب bone من قائمة الخصائص Properties.

اعد تسمية Bone إلى “Spine”.
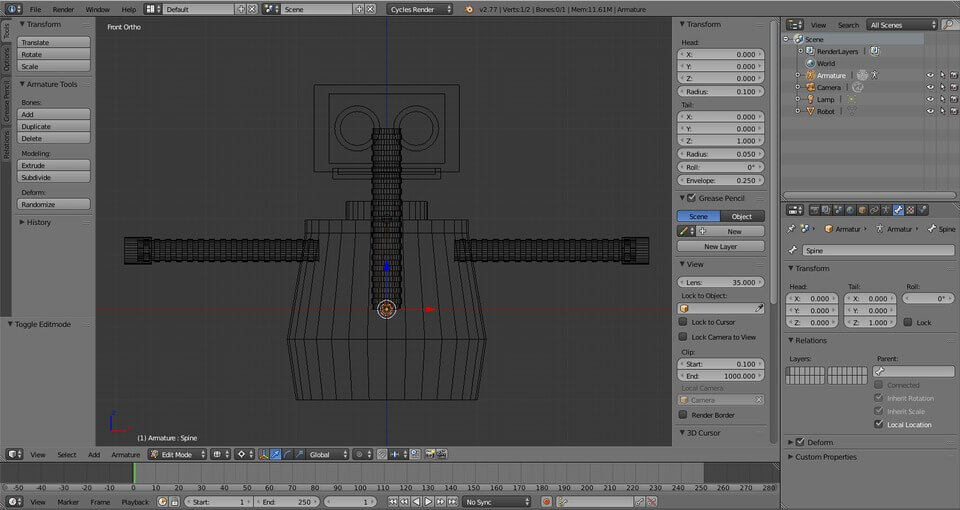
اضغط TAB لتعديل الوضع. استخدم RMB لتحديد قاع " Spine".
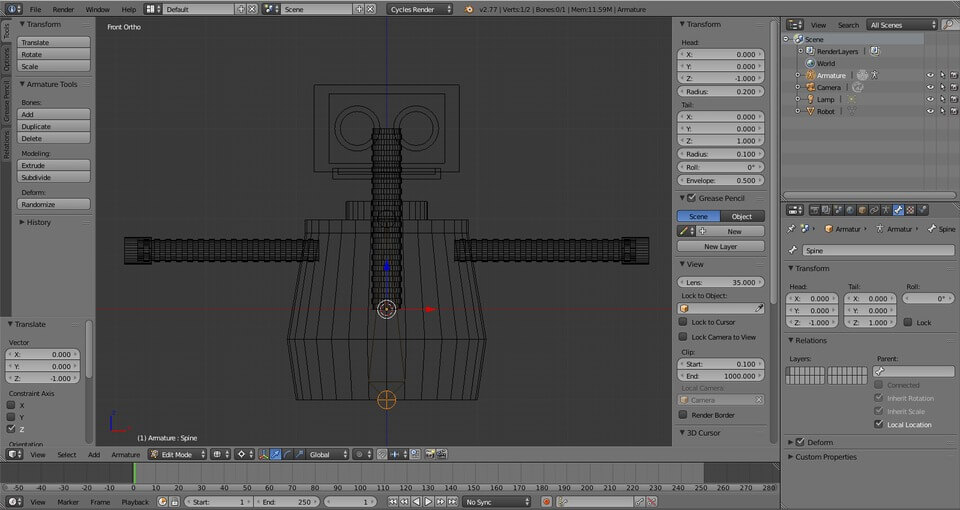
اضغط G للالتقاط وZ لتحريكه على محور Z فقط، ثمّ ادخل -1، واضغط ENTER.

الآن حدّد أعلى، أو رأس “Spine”.
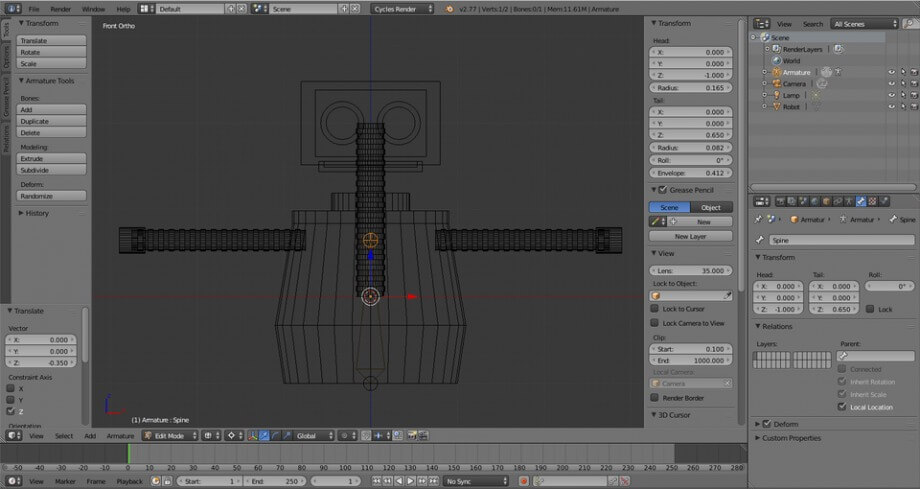
التقط بـ G، وقيد الحركة بـ Z، وحرّك للأسفل بمقدار -.35، ثمّ ENTER.
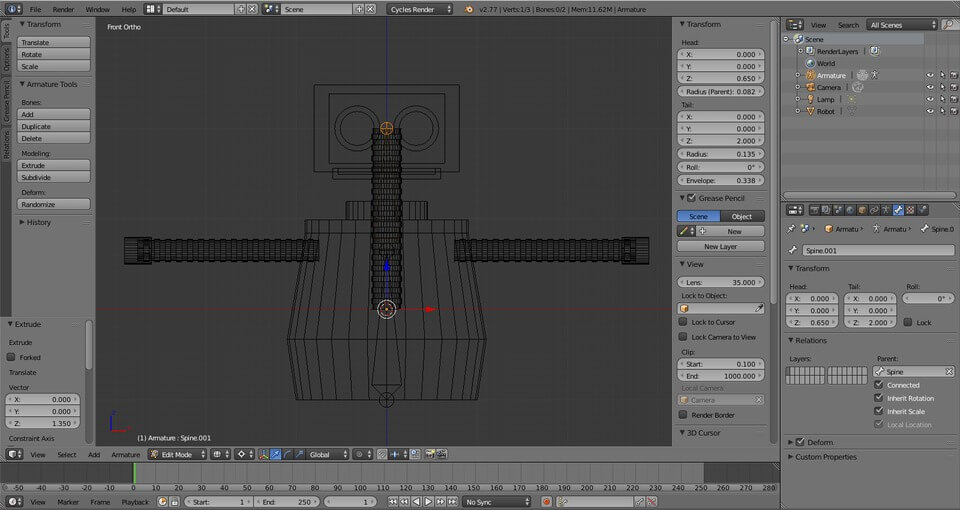
بالاحتفاظ بأعلى " Spine" محددًا، اضغط E لاستخراج عظمة جديدة، وZ لتقييدها على محور Z، ثمّ ادخل 1.35 واضغط ENTER.
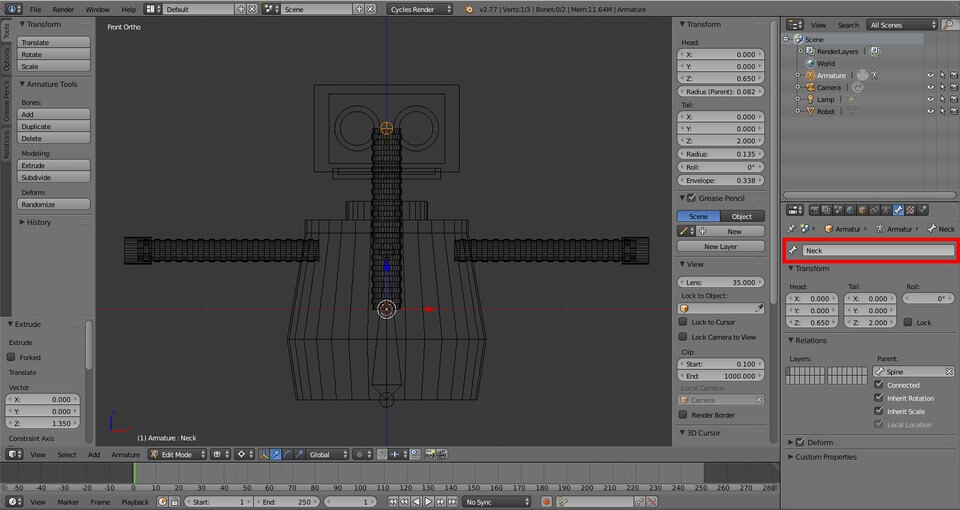
أعد تسمية العظمة الجديدة إلى “Neck”.

حدّد أعلى “Spine” مرة أخرى.
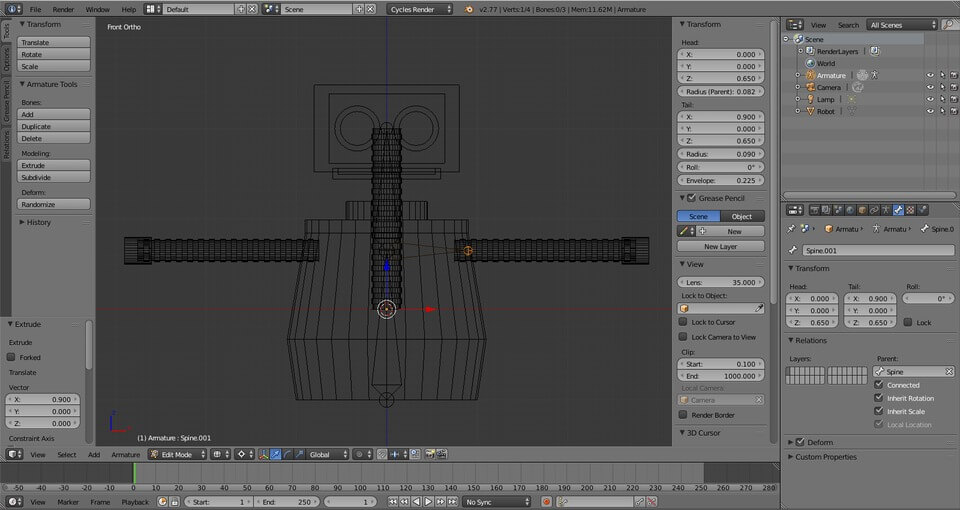
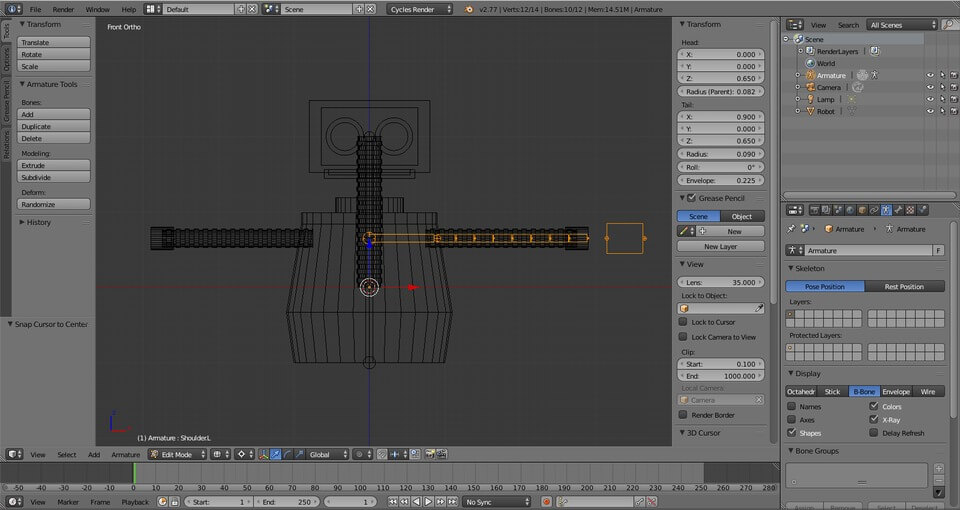
اضغط E لاستخراج عظمة جديدة وX لتقييدها على محور X. ادخل .9، واضغط ENTER. اعد تسمية هذه العظمة إلى “Shoulder.L”.
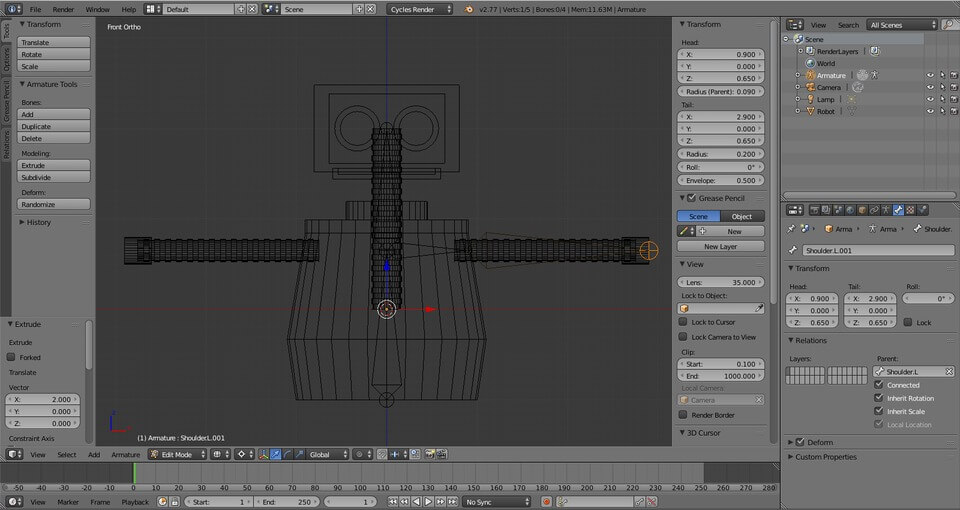
حدّد رأس " Shoulder.L" واضغط E، X ثمّ ادخل 2 متبوعةً بـ ENTER، لعمل استخراج بوحدتيّ بلندر على محورX.
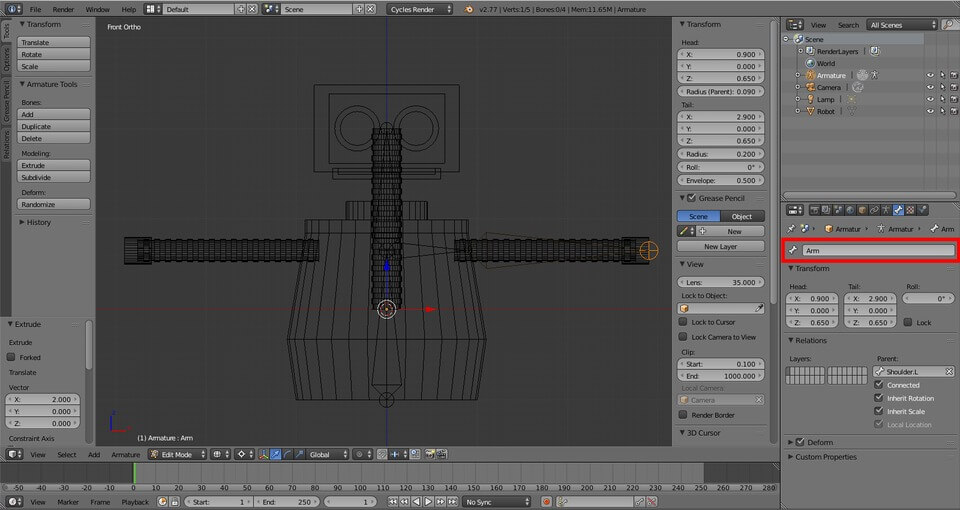
أعد تسمية هذه العظمة إلى “Arm”.
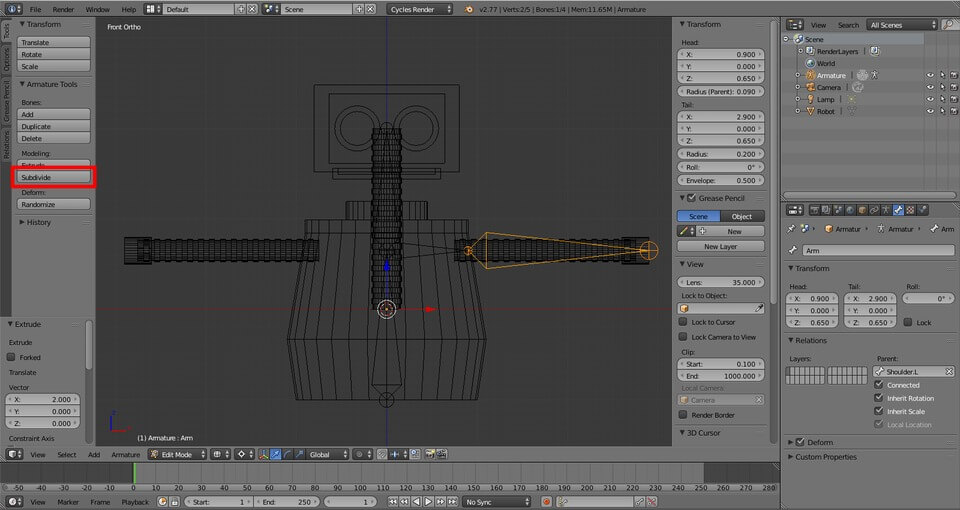
حدد عظمة “Arm” واضغط على Subdivide ثلاث مرّات من قائمة Tools.
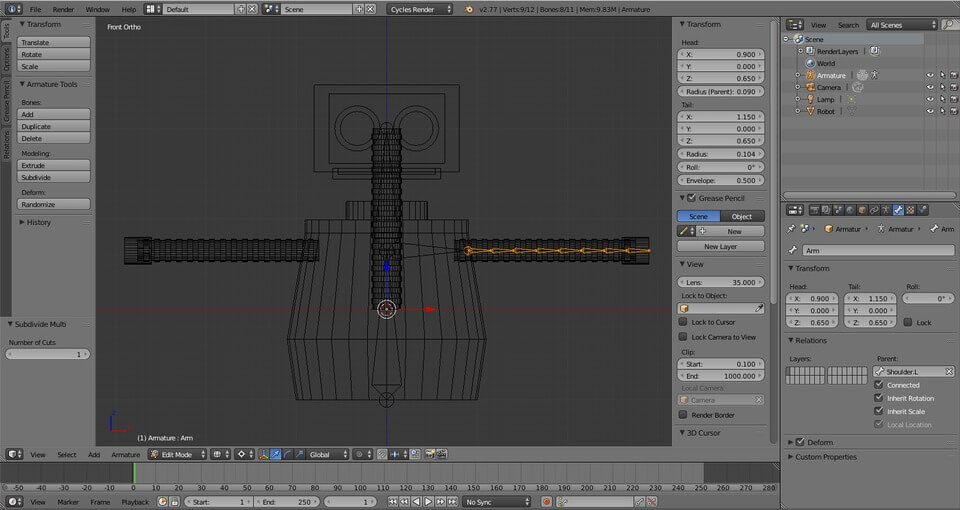
هذا سيقسّم “Arm” إلى ثمانية عظام. لا تلقى بالًا لتسميتهم.
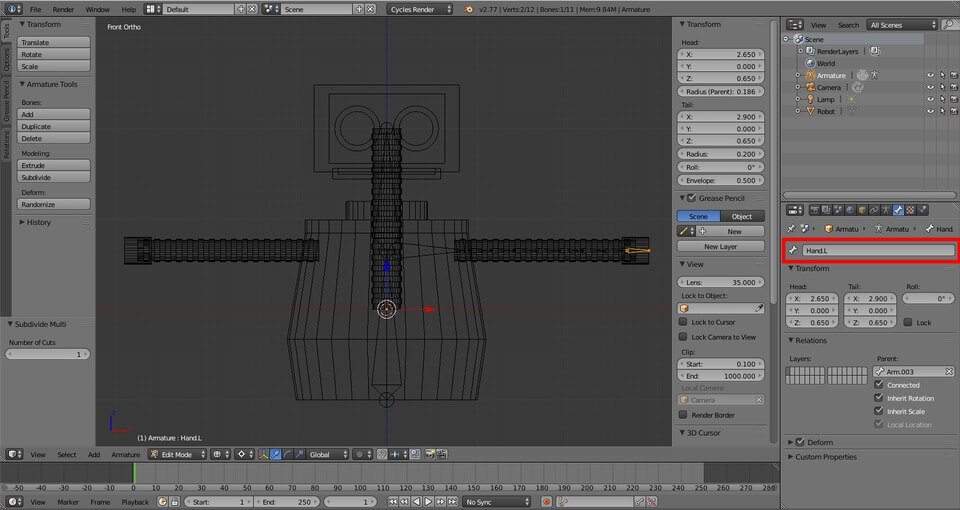
اختر العظمة الأخيرة، وأعد تسميتها إلى “Hand.L”.
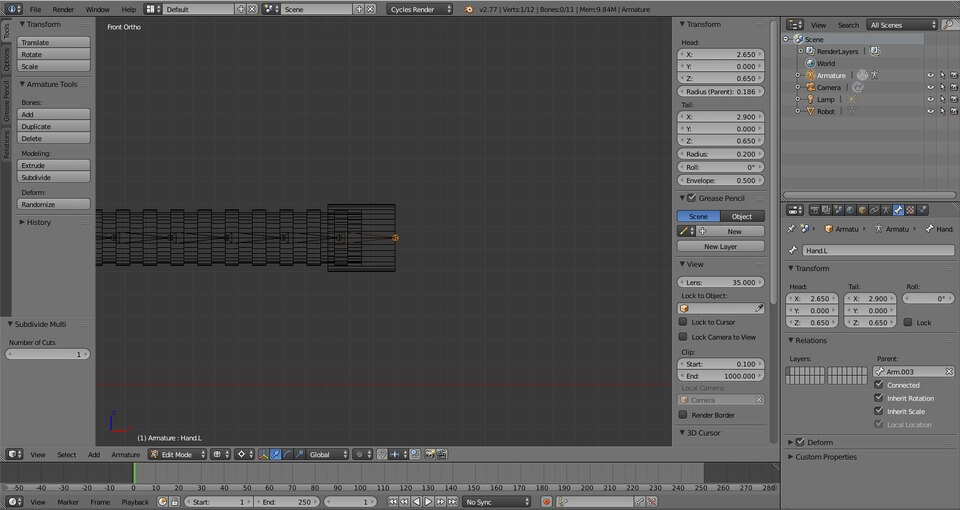
قرّب المشهد باستخدام عجلة الفأرة إن احتجت واختر رأس “Hand.L”.
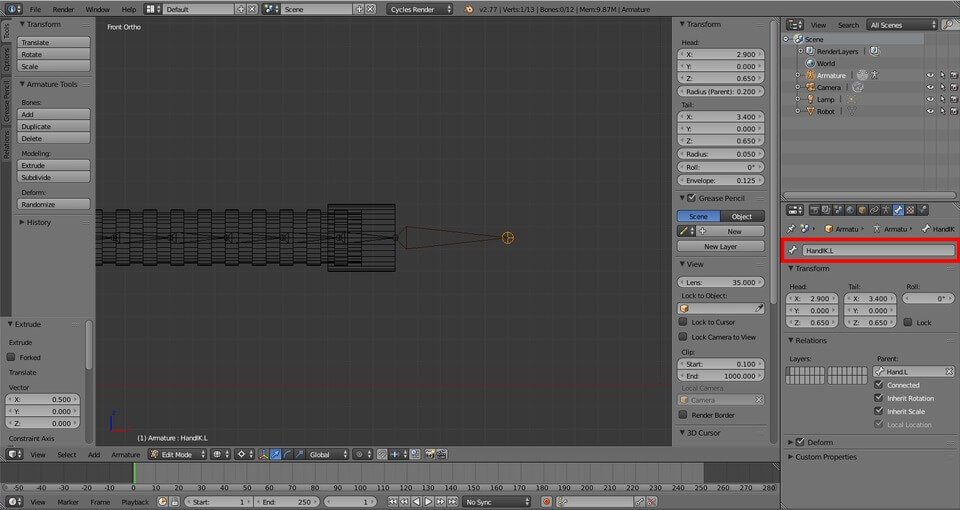
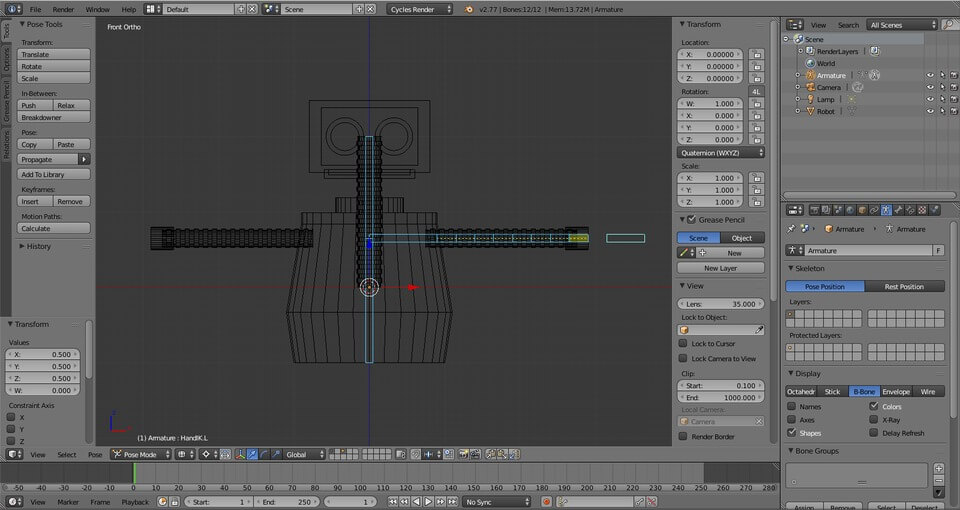
استخرج عظمة جديدة بضغط E، X وادخل .5، ثمّ ENTER. أعد تسمية العظمة الجديدة إلى “HandIK.L”.
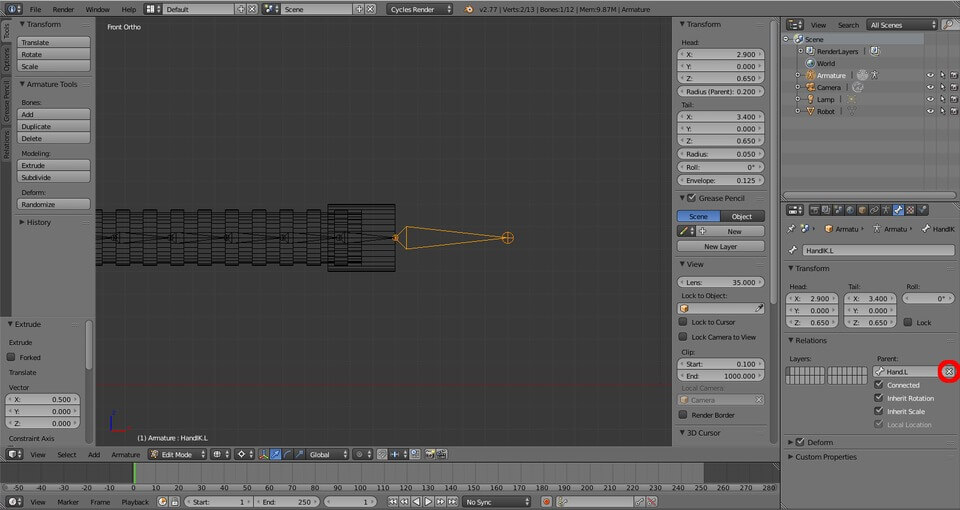
حدّد “HandIK.L” واذهب إلى لوحة الخصائص Properties، تحت تبويب Bone، تحت Relations، اضغط على علامة “X” بجانب اسمها في حقل Parent.
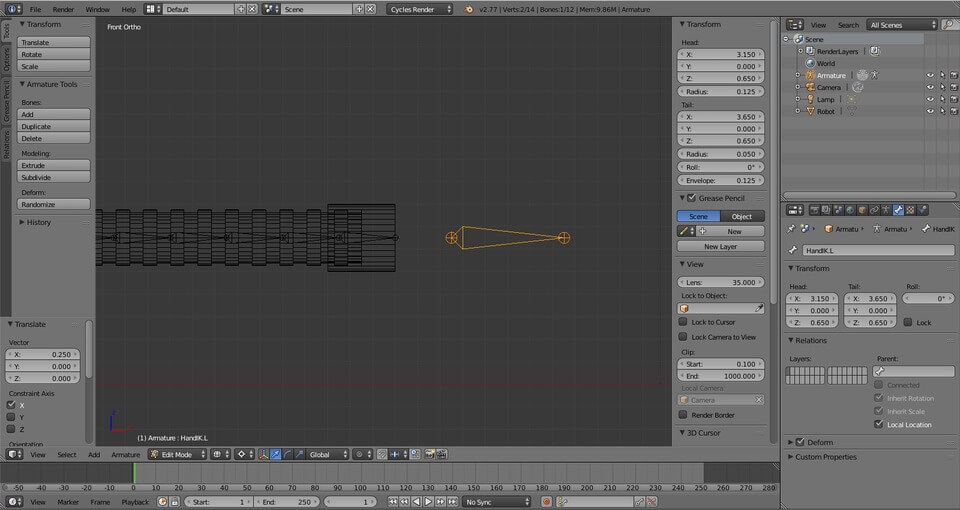
إلتقط " HandIK.L" بضغط G وحرّكه على محور X بضغط X وإدخال .25، ثمّ اضغط ENTER.
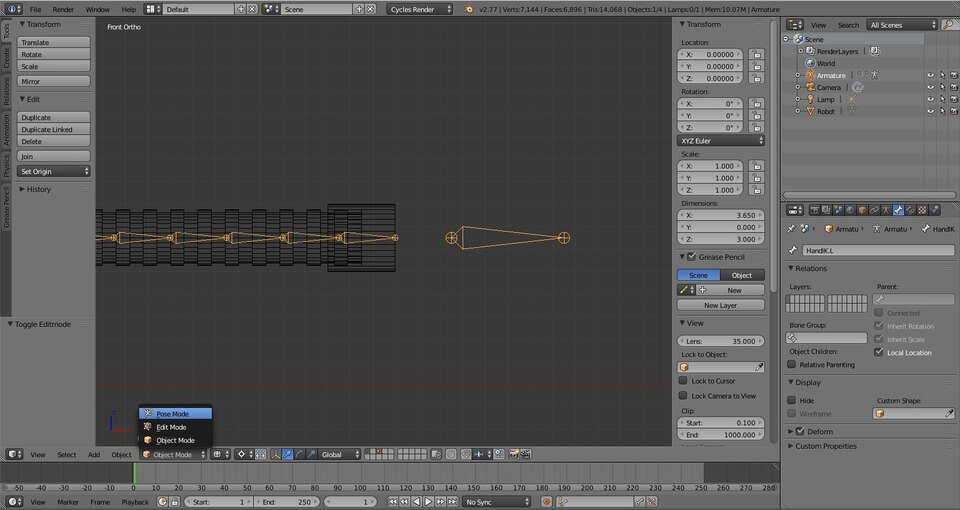
اضغط Tab لتعديل الوضع ومن Object Interaction Toggle، اختر Pose Mode.
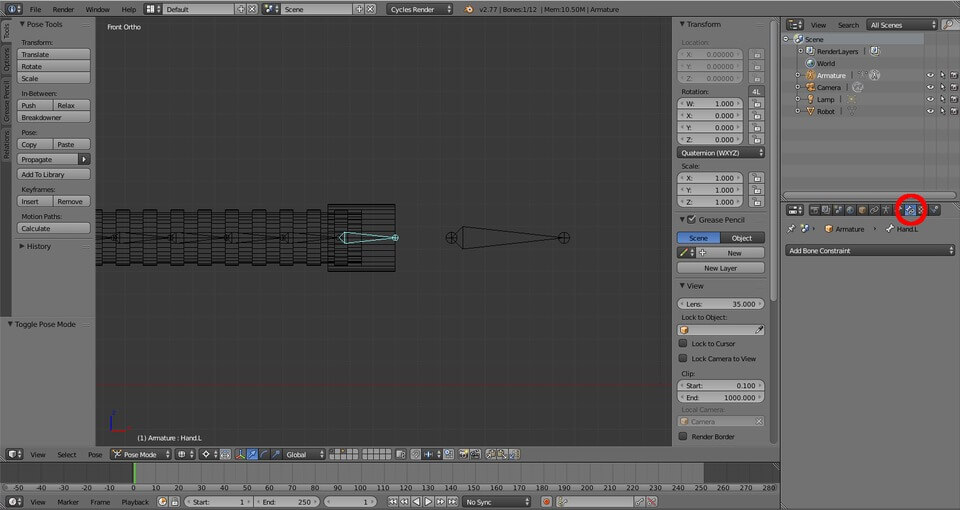
حدّد “Hand.L” ومن قائمة الخصائص Properties، اختر تبويب Bone Constraints.
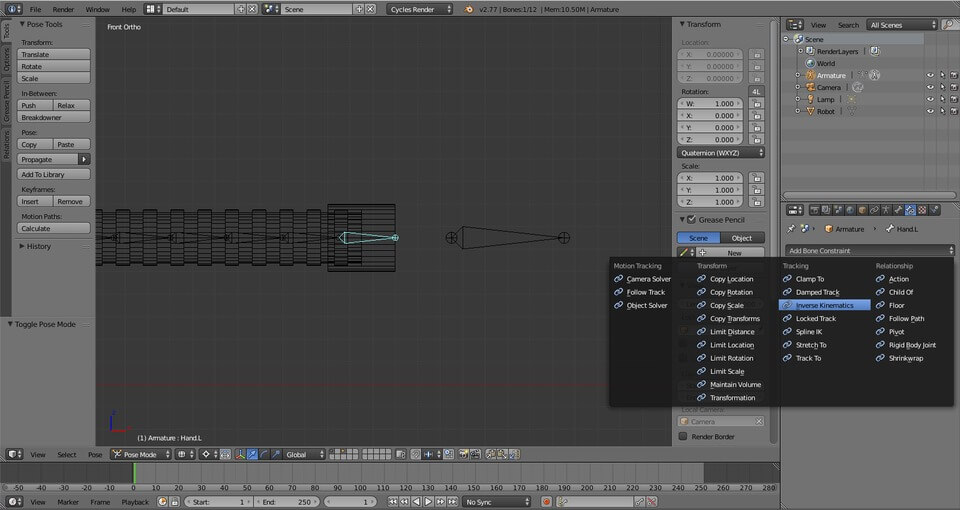
اضغط على زر Add Bone Constraint واختر Add Tracking : Inverse Kinematics.
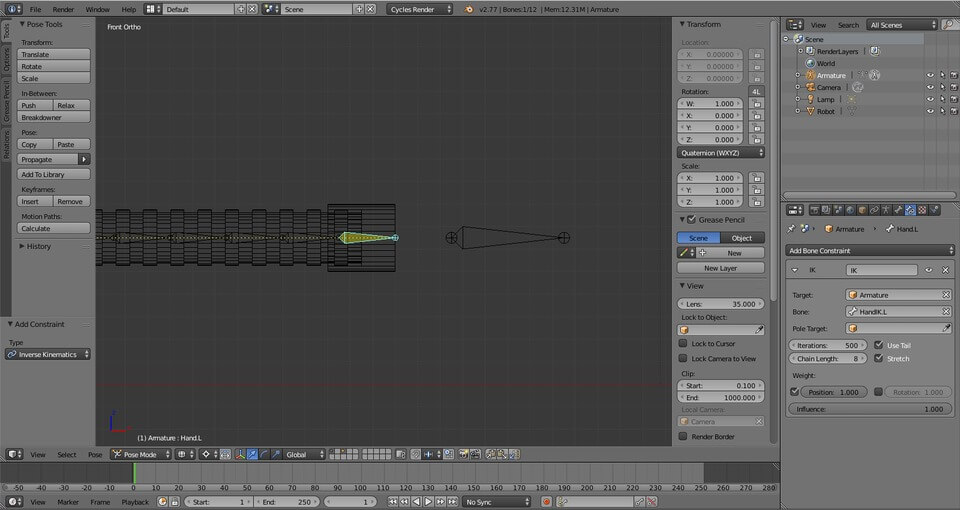
من لوحة IK، في حقل Target، اختر Armature وفي حقل Bone اختر HandIK.L. اضبط Chain Length إلى 8 (لأننا صنعنا ثمانية عظام عندما قسمنا “Arm” ونحن نحتاج سلسلة لربطهم مرة أخرى بالجسد).
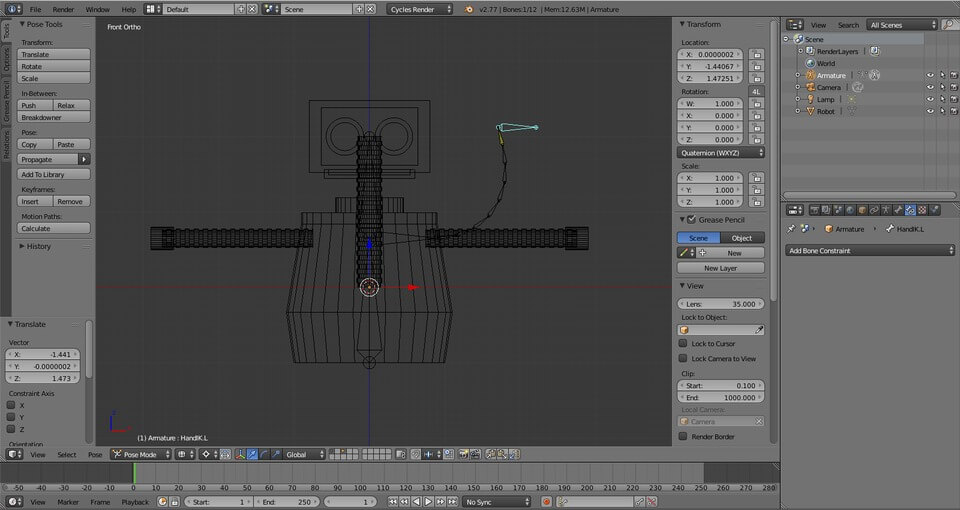
اختر HandIK.L وقم بالتقاطه بضغط G لتحريكه وترى كيف يعمل ذلك غالبًا. اضغط ALT + G لإعادة ضبط موضعه.
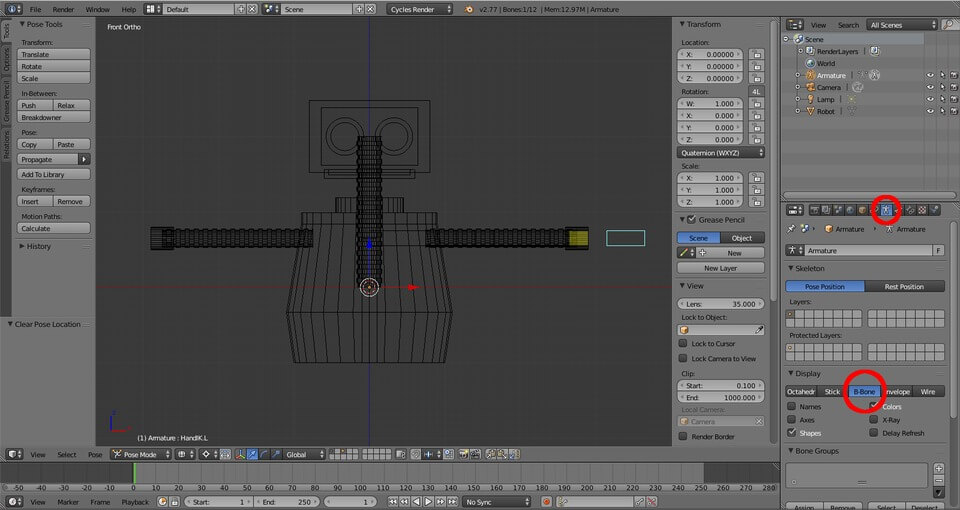
في قائمة الخصائص، اختر تبويب Armature Object Data. تحت Display اختر B-Bone.
اضغط A حتى يُحدد المحرك Armature بالكامل، ثمّ اضغط CTRL + ALT +S، لتغيير مقياس العظام وادخل .5، ثمّ اضغط ENTER.
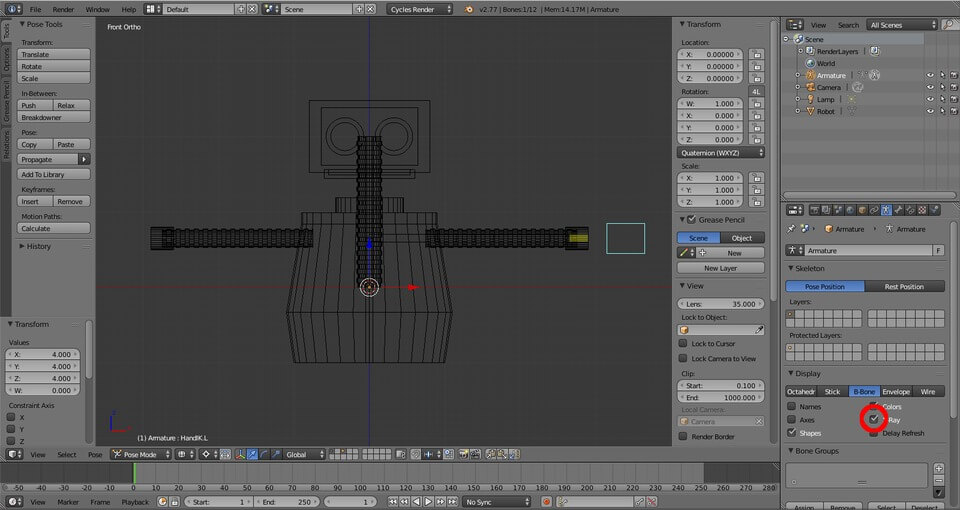
حدّد " HandIK.L" وقم بتكبير مقياسها باستخدام CTRL + ALT + S وادخل 4، ثمّ اضغط ENTER.
اضغط Tab لضبط الوضع. اضغط SHIFT + S واختر Cursor to Center. تأكد من أن خيار Pivot Point مضبوط على 3D Cursor. بضغط SHIFT مع الاستمرار، حدّد Shoulder، Arms، Hand وIK bone. لا تحدّد Spine أو Neck.
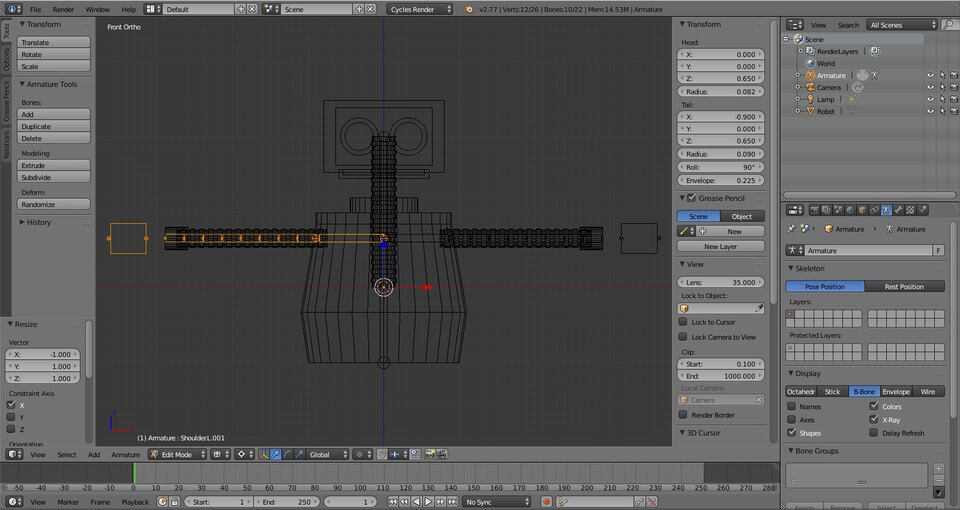
اضغط SHIFT + D لعمل نسخة طبق الأصل، ثمّ اضغط ENTER. الآن سنقوم باستدعاء النسخة طبق الأصل arm بتعديل مقياسها إلى الخلف 100% على محور X، اضغط S، X وادخل -1 واضغط ENTER.
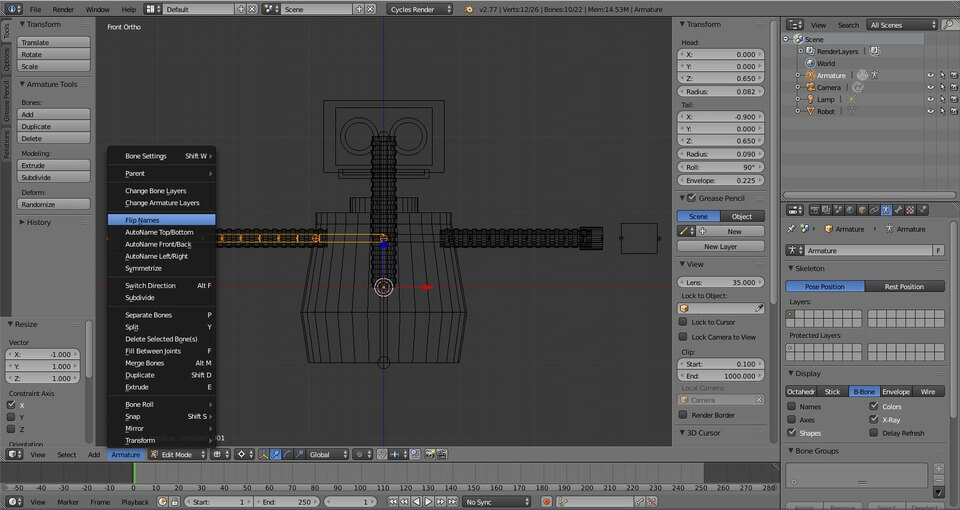
تحت Armature، اختر Flip Names.

ومن Object Mode، اختر عنصر Robot mesh.
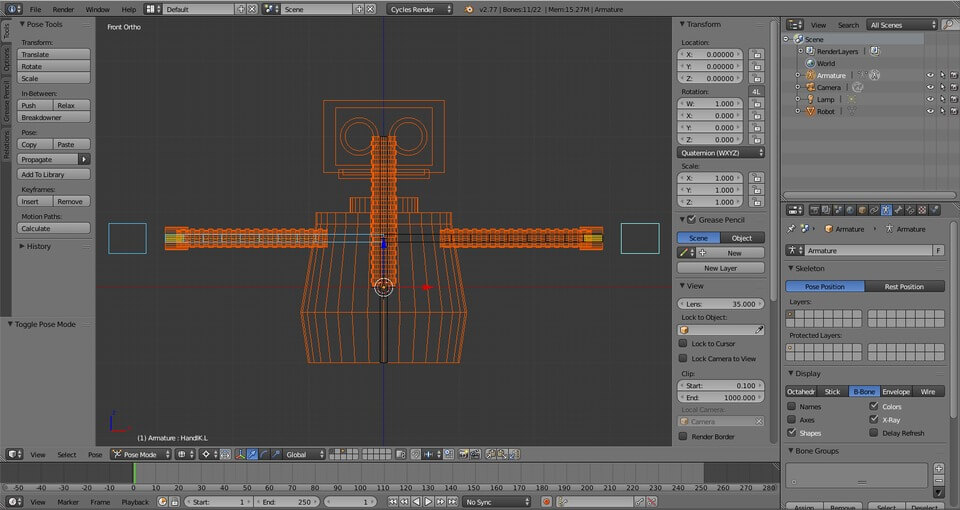
وبالضغط مع الاستمرار على SHIFT، اختر أي عظمة.
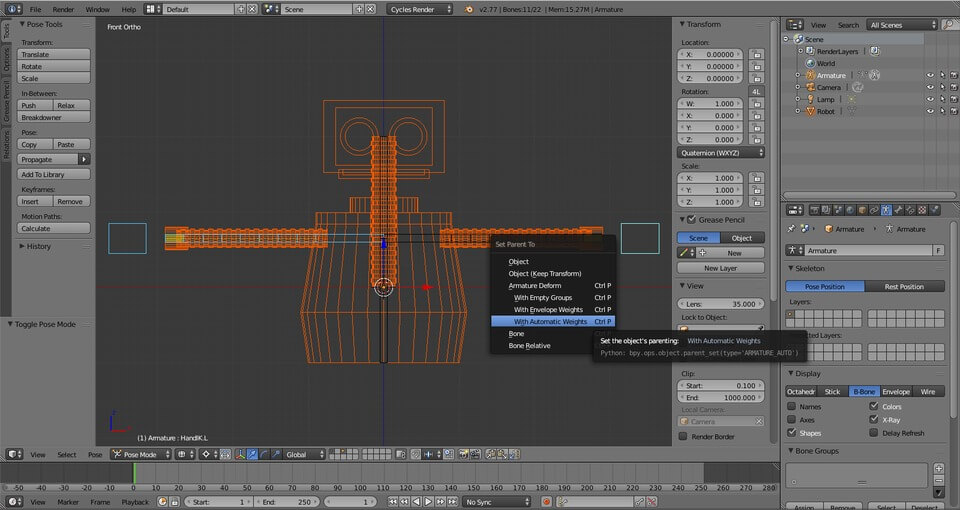
اضغط CTRL + P واختر Armature Deform مع Automatic Weights.
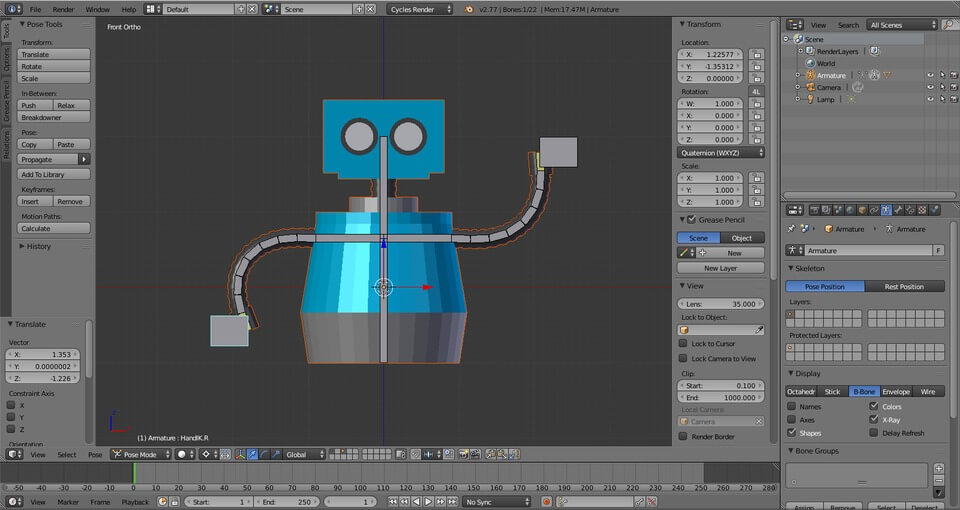
إلتقط " HandIKs" وقم بتحريكهم لترى كيف يعمل كل شيء تقريبًا. ثمّ اضغط ALT + G لإعادتهم إلى أوضاعهم السابقة.
ترجمة -وبتصرّف- للمقال How to Model and Animate a Robot: Rigging Blender Armatures لصاحبه Jared









أفضل التعليقات
لا توجد أية تعليقات بعد
انضم إلى النقاش
يمكنك أن تنشر الآن وتسجل لاحقًا. إذا كان لديك حساب، فسجل الدخول الآن لتنشر باسم حسابك.